Proportionalnavigation


Proportionalnavigation (abgekürzt auch PN oder Pro-Nav) ist ein Lenkverfahren, das bei den meisten modernen Lenkflugkörpern zum Einsatz kommt. Es macht sich die Tatsache zunutze, dass zwei Gegenstände, die sich linear mit konstanter Geschwindigkeit bewegen, genau dann auf Kollisionskurs sind, wenn sich die Peilung nicht ändert.[1]
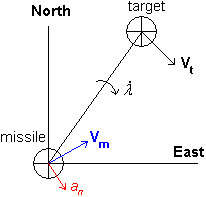
Der Kurs muss also derart korrigiert werden, dass das Ziel bezogen auf den eigenen Flugkörper immer in derselben Richtung zu sehen ist (α und β im Bild rechts konstant). Hierfür muss sich der Geschwindigkeitsvektor proportional zur Drehgeschwindigkeit der Verbindungslinie zwischen Flugkörper und Ziel ändern.

Dabei ist die Beschleunigung senkrecht zum Geschwindigkeitsvektor des Flugkörpers, ist eine dimensionslose Proportionalitätskonstante, ist die Drehgeschwindigkeit der Verbindungslinie und ist die Geschwindigkeit des Flugkörpers.




In Vektornotation kann die Beschleunigung wie folgt berechnet werden:[2]

mit der Drehgeschwindigkeit der Verbindungslinie :


Dieses einfache Prinzip wurde in Lenkwaffen der ersten Generation, z. B. in der AIM-9 Sidewinder, noch in Analogtechnik implementiert. Moderne Flugkörper erweitern dieses Verfahren um Algorithmen zur Vorhersage der Flugbahn des Zieles.
Siehe auch
- Radiodrome










