Cet article est une ébauche concernant la mécanique et la physique.
Vous pouvez partager vos connaissances en l’améliorant (comment ?) selon les recommandations des projets correspondants.
Consultez la liste des tâches à accomplir en page de discussion.
En physique, un pendule inversé est un pendule simple. Il présente une position d'équilibre instable s'il est maintenu vertical à 180°, mais cette position est maintenue par un système de contrôle ou par excitation de Kapitza. C'est un problème de physique non linéaire.
Équation du mouvement
La situation est exactement la même que celle décrite pour le pendule simple, en considérant une tige rigide mais de masse négligeable. On définit donc :
θ l'angle formé entre la tige et l'axe vertical orienté vers le haut ;
Si le pendule est laissé libre, on peut écrire la conservation de l'énergie mécanique, . Alors, on obtient :
.
La différence avec le pendule simple est que le pendule est en position haute ; cela correspond à un maximum de l'énergie potentielle, c'est-à-dire à un équilibre instable.
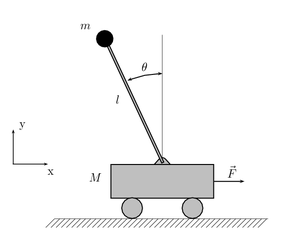
Pendule inversé sur un chariot
Un pendule inversé sur un chariot
On peut établir les équations du mouvement à partir de la mécanique lagrangienne : en notant x(t) la position du chariot, l'angle formé entre la tige et la verticale, le système étant soumis à la gravité et à une force F, extérieure et selon l'axe x, le lagrangien est :
avec T l'énergie cinétique et V l'énergie potentielle. On a ainsi :
avec la vitesse du chariot et celle de la masse . On peut exprimer et à partir de x et :
ce qui s'écrit encore :
Le lagrangien est donné par :
et les équations du mouvement sont donc :
En simplifiant ces équations, on obtient les équations, non linéaires, du mouvement du pendule :






















 Portail de la physique
Portail de la physique 







