線型代数学 において,n × n 行列 A の広義 (あるいは一般 )固有ベクトル (こうぎこゆうベクトル,いっぱんこゆうベクトル,英 : generalized eigenvector )は,(通常の)固有ベクトル の定義を緩めたある条件を満たすベクトル である.
V を n 次元ベクトル空間 とする.φ を V から V への線型写像 とする.A をある基底についての φ の行列表示 とする.
V の完全な基底をなす A の n 個の線型独立 な固有ベクトルがいつも存在するとは限らない.つまり,行列 A は対角化可能 とは限らない.これは少なくとも1つの固有値 λi の代数的重複度 がその幾何学的重複度 (行列 A − λi I 退化次数(英語版) ,あるいはその零空間 の次元)よりも大きいときに起こる.この場合,λi は不足固有値(英語版) と呼ばれ,A は不足行列(英語版) と呼ばれる.
λi に対応する広義固有ベクトル xi は,行列 A − λi I V の不変部分空間の基底をなす線型独立な広義固有ベクトルのジョルダン鎖を生成する.
広義固有ベクトルを用いて,A の線型独立な固有ベクトルの集合を必要ならば V の完全な基底に拡張できる.この基底は A に相似 なジョルダン標準形 にある「ほとんど対角な行列」J を決定するのに用いることができ,これは A のある行列関数(英語版) を計算するのに有用である.行列 J は A が対角化可能とは限らないときに線形微分方程式系 x′ A x
概要と定義 (通常の)固有ベクトル を定義するいくつかの同値な方法がある.n × n A の固有値 λ の固有ベクトル x (λI − A )x 0 なる零でないベクトルである,ただし I は n × n 単位行列 であり,0 n 次元の零ベクトル である.つまり,x 変換 A − λI A が n 個の線型独立な固有ベクトルを持てば,A は対角行列 D に相似である.つまり,ある可逆行列 M が存在して,A は相似変換 D = M −1 AM D は A のスペクトル行列(英語版) と呼ばれる.行列 M は A の モード行列(英語版) と呼ばれる.対角化可能な行列は,その行列関数が容易に計算できるなどの特長がある.
一方,n × n A が n 個の線型独立な固有ベクトルを持たないとき,A は対角化可能ではない.
定義 ベクトル x m A の固有値 λ に対応する階数 m の広義 (あるいは一般 )固有ベクトル (英 : generalized eigenvector ) であるとは, ( A − λ I ) m x m = 0 {\displaystyle (A-\lambda I)^{m}{\boldsymbol {x}}_{m}=0} ( A − λ I ) m − 1 x m ≠ 0 {\displaystyle (A-\lambda I)^{m-1}{\boldsymbol {x}}_{m}\neq {\boldsymbol {0}}} 明らかに,階数 1 の広義固有ベクトルは通常の固有ベクトルである.すべての n × n A は n 個の線型独立な広義固有ベクトルを持ち,ジョルダン標準形 の「ほとんど対角」な行列 J に相似であることを示すことができる.つまり,可逆行列 M が存在して,J = M −1 AM M は A の 広義モード行列(英語版) と呼ばれる.λ が代数的重複度 μ の固有値ならば,A は λ に対応する μ 個の線型独立な広義固有ベクトルを持つ.これらの結果は,A のある種の行列関数を簡易に計算する際に有用となる.
与えられた λ に対するすべての広義固有ベクトルによって張られる 集合は λ の広義 (あるいは一般 )固有空間 (英 : generalized eigenspace ) をなす.
例 広義固有ベクトルの概念を説明するいくつかの例を挙げる.詳細のいくつかは後で記述される.
例 1 まず,固有値が重複しても異なる(通常の)固有ベクトルが得られる例について示す.
A = [ 1 0 0 1 ] {\displaystyle A={\begin{bmatrix}1&0\\0&1\end{bmatrix}}} とする.A の固有値は,det(λI − A ) = 0 を満たす λ であり,これを解くと, ( λ − 1 ) 2 = 0 {\displaystyle (\lambda -1)^{2}=0} λ = 1 μ = 2 {\displaystyle \mu =2} λ = 1 x = [ x 1 x 2 ] {\textstyle {\boldsymbol {x}}={\begin{bmatrix}x_{1}\\x_{2}\end{bmatrix}}} ( 1 I − A ) x = 0 {\displaystyle (1I-A){\boldsymbol {x}}=0}
[ 0 0 0 0 ] [ x 1 x 2 ] = [ 0 0 ] {\displaystyle {\begin{bmatrix}0&0\\0&0\end{bmatrix}}{\begin{bmatrix}x_{1}\\x_{2}\end{bmatrix}}={\begin{bmatrix}0\\0\end{bmatrix}}} となり,x 1 x 2 x = [ 1 0 ] {\textstyle {\boldsymbol {x}}={\begin{bmatrix}1\\0\end{bmatrix}}} x = [ 0 1 ] {\textstyle {\boldsymbol {x}}={\begin{bmatrix}0\\1\end{bmatrix}}} λ = 1
なお,
rank ( λ I − A ) = 0 = 2 ⏟ n − 2 ⏟ γ {\displaystyle \operatorname {rank} (\lambda I-A)=0=\underbrace {2} _{n}-\underbrace {2} _{\gamma }} であり,幾何学的重複度は γ = 2λ = 1
例 2 固有値が重複する場合に異なる(通常の)固有ベクトルが得られない 例について示す.
A = [ 1 1 0 1 ] {\displaystyle A={\begin{bmatrix}1&1\\0&1\end{bmatrix}}} とする.A の固有値は,det(λI − A ) = 0 を満たす λ であり,これを解くと,(λ − 1)2 = 0 となり,ただ1つの固有値 λ = 1μ = 2
rank ( λ I − A ) = 1 = 2 ⏟ n − 1 ⏟ γ {\displaystyle \operatorname {rank} (\lambda I-A)=1=\underbrace {2} _{n}-\underbrace {1} _{\gamma }} で,幾何的重複度は γ = 1λ = 1
では,この固有値 λ = 1 x = [ x 1 x 2 ] {\textstyle {\boldsymbol {x}}={\begin{bmatrix}x_{1}\\x_{2}\end{bmatrix}}} (1I − A )x を満たすゼロでないベクトルを求めると,
[ 0 − 1 0 0 ] [ x 1 x 2 ] = [ 0 0 ] {\displaystyle {\begin{bmatrix}0&-1\\0&0\end{bmatrix}}{\begin{bmatrix}x_{1}\\x_{2}\end{bmatrix}}={\begin{bmatrix}0\\0\end{bmatrix}}} となり,x 1 x 2 = 0 x = [ 1 0 ] {\textstyle {\boldsymbol {x}}={\begin{bmatrix}1\\0\end{bmatrix}}} λ = 1x 1 x = [ 2 0 ] {\textstyle {\boldsymbol {x}}={\begin{bmatrix}2\\0\end{bmatrix}}} x = [ 1 0 ] {\textstyle {\boldsymbol {x}}={\begin{bmatrix}1\\0\end{bmatrix}}} x = [ 2 0 ] {\textstyle {\boldsymbol {x}}={\begin{bmatrix}2\\0\end{bmatrix}}}
つぎに,この(通常の)固有ベクトル x = [ 1 0 ] {\textstyle {\boldsymbol {x}}={\begin{bmatrix}1\\0\end{bmatrix}}} x 1 x 2 x 2 = [ x 21 x 22 ] {\textstyle {\boldsymbol {x}}_{2}={\begin{bmatrix}x_{21}\\x_{22}\end{bmatrix}}} ( λ I − A ) x 2 = − x 1 {\textstyle (\lambda I-A){\boldsymbol {x}}_{2}=-{\boldsymbol {x}}_{1}}
( 1 [ 1 0 0 1 ] − [ 1 1 0 1 ] ) [ x 21 x 22 ] = [ 0 − 1 0 0 ] [ x 21 x 22 ] = − [ 1 0 ] {\displaystyle \left(1{\begin{bmatrix}1&0\\0&1\end{bmatrix}}-{\begin{bmatrix}1&1\\0&1\end{bmatrix}}\right){\begin{bmatrix}x_{21}\\x_{22}\end{bmatrix}}={\begin{bmatrix}0&-1\\0&0\end{bmatrix}}{\begin{bmatrix}x_{21}\\x_{22}\end{bmatrix}}=-{\begin{bmatrix}1\\0\end{bmatrix}}} を解くと,x 21 x 22 = 1 x 2 = [ a 1 ] {\textstyle {\boldsymbol {x}}_{2}={\begin{bmatrix}a\\1\end{bmatrix}}} a は任意のスカラー値である.a = 0
x 1 x 2 V の基底をなす.
行列 A は,対角化可能ではないことに注意されたい.この行列は1つの 優対角(英語版) 成分があるから,階数が 1 よりも大きい一般化固有ベクトルが1つある(あるいは,ベクトル空間 V の次元は 2 だから階数が 1 よりも大きい広義固有ベクトルは高々1つであることも分かる).あるいは,(λI − A ) の零空間 の次元が p = 1m − p = 1
さて,求めた(通常の)固有ベクトルと(一般)固有ベクトルを並べた行列
M = [ x 1 x 2 ] = [ 1 0 0 1 ] {\displaystyle M={\begin{bmatrix}{\boldsymbol {x}}_{1}&{\boldsymbol {x}}_{2}\end{bmatrix}}={\begin{bmatrix}1&0\\0&1\end{bmatrix}}} に対して,
J = M − 1 A M = [ 1 1 0 1 ] {\displaystyle J=M^{-1}AM={\begin{bmatrix}1&1\\0&1\end{bmatrix}}} となり,A は対角化はできていないが,J には A の固有値が対角成分に現れ,右上に“1” が配置されたジョルダン標準形となっていることがわかる.
例 3 この例は例 2 よりも複雑である.低い次数のよい例題を構成することはやや少し難しい.
行列
A = [ 1 0 0 0 0 3 1 0 0 0 6 3 2 0 0 10 6 3 2 0 15 10 6 3 2 ] {\displaystyle A={\begin{bmatrix}1&0&0&0&0\\3&1&0&0&0\\6&3&2&0&0\\10&6&3&2&0\\15&10&6&3&2\end{bmatrix}}} の固有値は
det(λI − A ) = (λ − 1)2 (λ − 2)3 =0 の解なので,固有値 λ 1 = 1λ 2 = 2μ 1 = 2μ 2 = 3λ 1 = 1
rank ( λ 1 I − A ) = 4 = 5 ⏟ n − 1 ⏟ γ 1 {\displaystyle \operatorname {rank} (\lambda _{1}I-A)=4=\underbrace {5} _{n}-\underbrace {1} _{\gamma _{1}}} となるので,幾何学的重複度は γ 1 = 1λ 2 = 2
rank ( λ 2 I − A ) = 4 = 5 ⏟ n − 1 ⏟ γ 2 {\displaystyle \operatorname {rank} (\lambda _{2}I-A)=4=\underbrace {5} _{n}-\underbrace {1} _{\gamma _{2}}} となるので,幾何的重複度は γ 2 = 1
はじめに,λ 1 = 1x 11 γ 1 = 1x 11
( 1 I − A ) x 11 = [ 0 0 0 0 0 − 3 0 0 0 0 − 6 − 3 − 1 0 0 − 10 − 6 − 3 − 1 0 − 15 − 10 − 6 − 3 − 1 ] [ 0 3 − 9 9 − 3 ] = [ 0 0 0 0 0 ] = 0 , {\displaystyle (1I-A){\boldsymbol {x}}_{11}={\begin{bmatrix}0&0&0&0&0\\-3&0&0&0&0\\-6&-3&-1&0&0\\-10&-6&-3&-1&0\\-15&-10&-6&-3&-1\end{bmatrix}}{\begin{bmatrix}0\\3\\-9\\9\\-3\end{bmatrix}}={\begin{bmatrix}0\\0\\0\\0\\0\end{bmatrix}}={\boldsymbol {0}},} ( 1 I − A ) x 12 = [ 0 0 0 0 0 − 3 0 0 0 0 − 6 − 3 − 1 0 0 − 10 − 6 − 3 − 1 0 − 15 − 10 − 6 − 3 − 1 ] [ 1 − 15 30 − 1 − 45 ] = − [ 0 3 − 9 9 − 3 ] = − x 11 , {\displaystyle (1I-A){\boldsymbol {x}}_{12}={\begin{bmatrix}0&0&0&0&0\\-3&0&0&0&0\\-6&-3&-1&0&0\\-10&-6&-3&-1&0\\-15&-10&-6&-3&-1\end{bmatrix}}{\begin{bmatrix}1\\-15\\30\\-1\\-45\end{bmatrix}}=-{\begin{bmatrix}0\\3\\-9\\9\\-3\end{bmatrix}}=-{\boldsymbol {x}}_{11},} つぎに,λ 2 = 2x 21 γ 2 = 1x 22 x 23 x 21
( 2 I − A ) x 21 = [ 1 0 0 0 0 − 3 1 0 0 0 − 6 − 3 0 0 0 − 10 − 6 − 3 0 0 − 15 − 10 − 6 − 3 0 ] [ 0 0 0 0 9 ] = [ 0 0 0 0 0 ] = 0 , {\displaystyle (2I-A){\boldsymbol {x}}_{21}={\begin{bmatrix}1&0&0&0&0\\-3&1&0&0&0\\-6&-3&0&0&0\\-10&-6&-3&0&0\\-15&-10&-6&-3&0\end{bmatrix}}{\begin{bmatrix}0\\0\\0\\0\\9\end{bmatrix}}={\begin{bmatrix}0\\0\\0\\0\\0\end{bmatrix}}={\boldsymbol {0}},} ( 2 I − A ) x 22 = [ 1 0 0 0 0 − 3 1 0 0 0 − 6 − 3 0 0 0 − 10 − 6 − 3 0 0 − 15 − 10 − 6 − 3 0 ] [ 0 0 0 3 0 ] = − [ 0 0 0 0 9 ] = − x 21 , {\displaystyle (2I-A){\boldsymbol {x}}_{22}={\begin{bmatrix}1&0&0&0&0\\-3&1&0&0&0\\-6&-3&0&0&0\\-10&-6&-3&0&0\\-15&-10&-6&-3&0\end{bmatrix}}{\begin{bmatrix}0\\0\\0\\3\\0\end{bmatrix}}=-{\begin{bmatrix}0\\0\\0\\0\\9\end{bmatrix}}=-{\boldsymbol {x}}_{21},} ( 2 I − A ) x 23 = [ 1 0 0 0 0 − 3 1 0 0 0 − 6 − 3 0 0 0 − 10 − 6 − 3 0 0 − 15 − 10 − 6 − 3 0 ] [ 0 0 1 − 2 0 ] = − [ 0 0 0 3 0 ] = − x 22 {\displaystyle (2I-A){\boldsymbol {x}}_{23}={\begin{bmatrix}1&0&0&0&0\\-3&1&0&0&0\\-6&-3&0&0&0\\-10&-6&-3&0&0\\-15&-10&-6&-3&0\end{bmatrix}}{\begin{bmatrix}0\\0\\1\\-2\\0\end{bmatrix}}=-{\begin{bmatrix}0\\0\\0\\3\\0\end{bmatrix}}=-{\boldsymbol {x}}_{22}} これは A の各広義固有空間の基底となる.広義固有ベクトルの2つの鎖と合わせて5次元列ベクトル全体の空間を張る.
{ x 11 , x 12 } = { [ 0 3 − 9 9 − 3 ] , [ 1 − 15 30 − 1 − 45 ] } , { x 21 , x 22 , x 23 } = { [ 0 0 0 0 9 ] , [ 0 0 0 3 0 ] , [ 0 0 1 − 2 0 ] } {\displaystyle \left\{{\boldsymbol {x}}_{11},{\boldsymbol {x}}_{12}\right\}=\left\{{\begin{bmatrix}0\\3\\-9\\9\\-3\end{bmatrix}},\,{\begin{bmatrix}1\\-15\\30\\-1\\-45\end{bmatrix}}\right\},\;\left\{{\boldsymbol {x}}_{21},{\boldsymbol {x}}_{22},{\boldsymbol {x}}_{23}\right\}=\left\{{\begin{bmatrix}0\\0\\0\\0\\9\end{bmatrix}},\,{\begin{bmatrix}0\\0\\0\\3\\0\end{bmatrix}},\,{\begin{bmatrix}0\\0\\1\\-2\\0\end{bmatrix}}\right\}} A に相似な「ほぼ対角」なジョルダン標準形の行列 J は以下のようにして得られる:
M = [ x 11 x 21 x 21 x 22 x 23 ] = [ 0 1 0 0 0 3 − 15 0 0 0 − 9 30 0 0 1 9 − 1 0 3 − 2 − 3 − 45 9 0 0 ] , {\displaystyle M={\begin{bmatrix}{\boldsymbol {x}}_{11}&{\boldsymbol {x}}_{21}&{\boldsymbol {x}}_{21}&{\boldsymbol {x}}_{22}&{\boldsymbol {x}}_{23}\end{bmatrix}}={\begin{bmatrix}0&1&0&0&0\\3&-15&0&0&0\\-9&30&0&0&1\\9&-1&0&3&-2\\-3&-45&9&0&0\end{bmatrix}},} J = M − 1 A M = [ 1 1 0 0 0 0 1 0 0 0 0 0 2 1 0 0 0 0 2 1 0 0 0 0 2 ] , {\displaystyle J=M^{-1}AM={\begin{bmatrix}1&1&0&0&0\\0&1&0&0&0\\0&0&2&1&0\\0&0&0&2&1\\0&0&0&0&2\end{bmatrix}},} ただし M は A の 広義モード行列(英語版) であり,M の列は A の標準基底 (英語版) AM = MJ
ジョルダン鎖 定義 x m A の固有値 λ に対応する階数 m の広義固有ベクトルとする.x m によって生成される鎖 とは次で与えられるベクトルの集合 { x m , x m − 1 , … , x 1 } {\displaystyle \left\{{\boldsymbol {x}}_{m},{\boldsymbol {x}}_{m-1},\dots ,{\boldsymbol {x}}_{1}\right\}} したがって,一般に,
x j = ( A − λ I ) m − j x m = ( A − λ I ) x j + 1 ( j = 1 , 2 , … , m − 1 ) . {\displaystyle {\boldsymbol {x}}_{j}=(A-\lambda I)^{m-j}{\boldsymbol {x}}_{m}=(A-\lambda I){\boldsymbol {x}}_{j+1}\qquad (j=1,2,\dots ,m-1).}
(2 )
(2 x j λ に対応する階数 j の広義固有ベクトルである.鎖はベクトルの線型独立な集合である.
標準基底 定義 :n 個の線型独立な広義固有ベクトルの集合が標準基底 (canonical basis) であるとは,ジョルダン鎖の全体からなることをいう.
したがって,階数 m の広義固有ベクトルが標準基底に入っていることを一度決定すれば,x m m − 1 x m − 1 , x m − 2 , … , x 1 {\displaystyle {\boldsymbol {x}}_{m-1},{\boldsymbol {x}}_{m-2},\ldots ,{\boldsymbol {x}}_{1}}
λi を A の代数的重複度 μi の固有値とする.まず,行列 ( A − λ i I ) , ( A − λ i I ) 2 , … , ( A − λ i I ) m i {\displaystyle (A-\lambda _{i}I),(A-\lambda _{i}I)^{2},\ldots ,(A-\lambda _{i}I)^{m_{i}}} 階数 を求める.整数 mi は ( A − λ i I ) m i {\displaystyle (A-\lambda _{i}I)^{m_{i}}} n − μi n は A の行や列の個数である,つまり A は n × n
さて
ρ k = rank ( A − λ i I ) k − 1 − rank ( A − λ i I ) k ( k = 1 , 2 , … , m i ) {\displaystyle \rho _{k}=\operatorname {rank} (A-\lambda _{i}I)^{k-1}-\operatorname {rank} (A-\lambda _{i}I)^{k}\qquad (k=1,2,\ldots ,m_{i})} と定義する.変数 ρk は A の標準基底に現れる固有値 λi に対応する階数 k の線型独立な広義固有ベクトルの個数を表す.
rank ( A − λ i I ) 0 = rank ( I ) = n {\displaystyle \operatorname {rank} (A-\lambda _{i}I)^{0}=\operatorname {rank} (I)=n} に注意.
広義固有ベクトルの計算 これまでの節で n × n A に付随するベクトル空間 V に対する標準基底の n 個の線型独立な広義固有ベクトルを得る方法を見た.これらの方法を結合して手順を得る:
固有値 λi と代数的重複度 μi に対する A の特性方程式 を解く; 各 λi に対して: n − μi mi を決定する;k = 1, ..., mi ρk を決定する;λi に対して各ジョルダン鎖を決定する; 例 4 行列
A = [ 5 1 − 2 4 0 5 2 2 0 0 5 3 0 0 0 4 ] {\displaystyle A={\begin{bmatrix}5&1&-2&4\\0&5&2&2\\0&0&5&3\\0&0&0&4\end{bmatrix}}} の固有値は
det ( λ I − A ) = ( λ − 5 ) 3 ( λ − 4 ) 1 = 0 {\displaystyle \det(\lambda I-A)=(\lambda -5)^{3}(\lambda -4)^{1}=0} の解であり,これを解くと λ 1 = 5μ 1 = 3λ 2 = 4μ 2 = 1n = 4λ 1 = 5n − μ 1 = 4 − 3 = 1
( A − 5 I ) = [ 0 1 − 2 4 0 0 2 2 0 0 0 3 0 0 0 − 1 ] , rank ( A − 5 I ) = 3. {\displaystyle (A-5I)={\begin{bmatrix}0&1&-2&4\\0&0&2&2\\0&0&0&3\\0&0&0&-1\end{bmatrix}},\qquad \operatorname {rank} (A-5I)=3.} ( A − 5 I ) 2 = [ 0 0 2 − 8 0 0 0 4 0 0 0 − 3 0 0 0 1 ] , rank ( A − 5 I ) 2 = 2. {\displaystyle (A-5I)^{2}={\begin{bmatrix}0&0&2&-8\\0&0&0&4\\0&0&0&-3\\0&0&0&1\end{bmatrix}},\qquad \operatorname {rank} (A-5I)^{2}=2.} ( A − 5 I ) 3 = [ 0 0 0 14 0 0 0 − 4 0 0 0 3 0 0 0 − 1 ] , rank ( A − 5 I ) 3 = 1. {\displaystyle (A-5I)^{3}={\begin{bmatrix}0&0&0&14\\0&0&0&-4\\0&0&0&3\\0&0&0&-1\end{bmatrix}},\qquad \operatorname {rank} (A-5I)^{3}=1.} ( A − 5 I ) m 1 {\displaystyle (A-5I)^{m_{1}}} n − μ 1 = 1m 1 m 1 = 3
次のように定義する:
ρ 3 = rank ( A − 5 I ) 2 − rank ( A − 5 I ) 3 = 2 − 1 = 1 , ρ 2 = rank ( A − 5 I ) 1 − rank ( A − 5 I ) 2 = 3 − 2 = 1 , ρ 1 = rank ( A − 5 I ) 0 − rank ( A − 5 I ) 1 = 4 − 3 = 1. {\displaystyle {\begin{aligned}\rho _{3}&=\operatorname {rank} (A-5I)^{2}-\operatorname {rank} (A-5I)^{3}=2-1=1,\\\rho _{2}&=\operatorname {rank} (A-5I)^{1}-\operatorname {rank} (A-5I)^{2}=3-2=1,\\\rho _{1}&=\operatorname {rank} (A-5I)^{0}-\operatorname {rank} (A-5I)^{1}=4-3=1.\end{aligned}}} したがって,3つの線型独立な広義固有ベクトルが存在する;階数 3, 2, 1 に1つずつである.λ 1 λ 1
( A − 5 I ) 3 x 3 = 0 {\displaystyle (A-5I)^{3}{\boldsymbol {x}}_{3}={\boldsymbol {0}}}
(3 )
( A − 5 I ) 2 x 3 ≠ 0 {\displaystyle (A-5I)^{2}{\boldsymbol {x}}_{3}\neq {\boldsymbol {0}}}
(4 )
なるものが存在することを知っている.方程式 (3 4 x 3 線型方程式系 を表す.
x 3 = [ x 31 x 32 x 33 x 34 ] {\displaystyle {\boldsymbol {x}}_{3}={\begin{bmatrix}x_{31}\\x_{32}\\x_{33}\\x_{34}\end{bmatrix}}} とする.すると
( A − 5 I ) 3 x 3 = [ 0 0 0 14 0 0 0 − 4 0 0 0 3 0 0 0 − 1 ] [ x 31 x 32 x 33 x 34 ] = [ 14 x 34 − 4 x 34 3 x 34 − x 34 ] = [ 0 0 0 0 ] {\displaystyle (A-5I)^{3}{\boldsymbol {x}}_{3}={\begin{bmatrix}0&0&0&14\\0&0&0&-4\\0&0&0&3\\0&0&0&-1\end{bmatrix}}{\begin{bmatrix}x_{31}\\x_{32}\\x_{33}\\x_{34}\end{bmatrix}}={\begin{bmatrix}14x_{34}\\-4x_{34}\\3x_{34}\\-x_{34}\end{bmatrix}}={\begin{bmatrix}0\\0\\0\\0\end{bmatrix}}} および
( A − 5 I ) 2 x 3 = [ 0 0 2 − 8 0 0 0 4 0 0 0 − 3 0 0 0 1 ] [ x 31 x 32 x 33 x 34 ] = [ 2 x 33 − 8 x 34 4 x 34 − 3 x 34 x 34 ] ≠ [ 0 0 0 0 ] {\displaystyle (A-5I)^{2}{\boldsymbol {x}}_{3}={\begin{bmatrix}0&0&2&-8\\0&0&0&4\\0&0&0&-3\\0&0&0&1\end{bmatrix}}{\begin{bmatrix}x_{31}\\x_{32}\\x_{33}\\x_{34}\end{bmatrix}}={\begin{bmatrix}2x_{33}-8x_{34}\\4x_{34}\\-3x_{34}\\x_{34}\end{bmatrix}}\neq {\begin{bmatrix}0\\0\\0\\0\end{bmatrix}}} である.したがって,条件 (3 4 x 34 = 0x 33 ≠ 0x 31 x 32 x 31 = x 32 = x 34 = 0x 33 = 1λ 1 = 5
x 3 = [ 0 0 1 0 ] {\displaystyle {\boldsymbol {x}}_{3}={\begin{bmatrix}0\\0\\1\\0\end{bmatrix}}} を得る.x 31 x 32 x 33 x 33 ≠ 0
さて方程式 (1 x 2 x 1
x 2 = ( A − 5 I ) x 3 = [ − 2 2 0 0 ] {\displaystyle {\boldsymbol {x}}_{2}=(A-5I){\boldsymbol {x}}_{3}={\begin{bmatrix}-2\\2\\0\\0\end{bmatrix}}} および
x 1 = ( A − 5 I ) x 2 = [ 2 0 0 0 ] {\displaystyle {\boldsymbol {x}}_{1}=(A-5I){\boldsymbol {x}}_{2}={\begin{bmatrix}2\\0\\0\\0\end{bmatrix}}} である.代数的重複度が 1 の固有値 λ 2 = 4標準的な手法 で扱うことができ,通常の固有ベクトル
y 1 = [ − 14 4 − 3 1 ] {\displaystyle {\boldsymbol {y}}_{1}={\begin{bmatrix}-14\\4\\-3\\1\end{bmatrix}}} を持つ.A の標準基底は
{ x 3 , x 2 , x 1 , y 1 } = { [ 0 0 1 0 ] [ − 2 2 0 0 ] [ 2 0 0 0 ] [ − 14 4 − 3 1 ] } {\displaystyle \left\{{\boldsymbol {x}}_{3},{\boldsymbol {x}}_{2},{\boldsymbol {x}}_{1},{\boldsymbol {y}}_{1}\right\}=\left\{{\begin{bmatrix}0\\0\\1\\0\end{bmatrix}}{\begin{bmatrix}-2\\2\\0\\0\end{bmatrix}}{\begin{bmatrix}2\\0\\0\\0\end{bmatrix}}{\begin{bmatrix}-14\\4\\-3\\1\end{bmatrix}}\right\}} である.x 1 , x 2 , x 3 λ 1 y 2 λ 2
これはかなり単純な例であることに注意すべきである.一般に,階数 k の線型独立な広義固有ベクトルの個数 ρk は必ずしも等しくない.つまり,特定の固有値に対応する異なる長さのいくつかの鎖があるかもしれない.
広義モード行列 詳細は「広義モード行列(英語版) 」を参照
A を n × n A の広義モード行列 (generalized modal matrix ) M とは,n × n A の標準基底をなし,M において以下の規則に従って現れるものをいう:
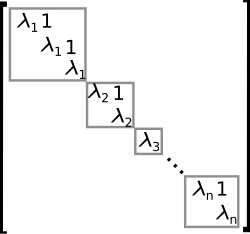
1つのベクトルからなるすべてのジョルダン鎖は M のはじめの列に現れる. 1つの鎖のすべてのベクトルは M の隣接する列に一緒に現れる. 各鎖は M において階数が増える順番で現れる(つまり,階数 1 の広義固有ベクトルは同じ鎖の階数 2 の広義固有ベクトルよりも前に現れ,これは同じ鎖の階数 3 の広義固有ベクトルよりも前に現れ,……). ジョルダン標準形 ジョルダン標準形の行列の例.灰色の箱はジョルダンブロックと呼ばれる. V を n 次元ベクトル空間とする;φ を V から自身への線型写像全体の集合 End(V ) の元とする;A をある基底に関する φ の行列表示とする.次のことを示すことができる.A の特性多項式 f (λ )
f ( λ ) = ± ( λ − λ 1 ) μ 1 ( λ − λ 2 ) μ 2 ⋯ ( λ − λ r ) μ r {\displaystyle f(\lambda )=\pm (\lambda -\lambda _{1})^{\mu _{1}}(\lambda -\lambda _{2})^{\mu _{2}}\cdots (\lambda -\lambda _{r})^{\mu _{r}}} の形,ただし λ 1 , λ 2 , … , λ r {\displaystyle \lambda _{1},\lambda _{2},\ldots ,\lambda _{r}} A の相異なる固有値,になれば,各 μi は対応する固有値 λi の代数的重複度であり,A はジョルダン標準形 の行列 J に相似である,ただし各 λi は対角線上連続した μi 回現れ,各 λi の上(すなわち優対角(英語版) )の各成分は 0 または 1 である;各 λi の最初の出現の上の成分はつねに 0 である.すべての他の成分は 0 である.行列 J は A の対角化にできるだけ近い.A が対角化可能ならば,対角線の上のすべての成分は 0 である.教科書によっては優対角成分ではなく 劣対角成分(英語版) , すなわち主対角線の直下に 1 たちがあることに注意.固有値はなお主対角線にある.
すべての n × n A は相似変換 J = M −1 AM J に相似である,ただし M は A の広義モード行列である。
例 5 A = [ 0 4 2 − 3 8 3 4 − 8 − 2 ] {\displaystyle A={\begin{bmatrix}0&4&2\\-3&8&3\\4&-8&-2\end{bmatrix}}} に相似なジョルダン標準形の行列を見つけよ.
解 :A の特性方程式は (λ − 2)3 = 0 であるので,固有値は λ = 2μ = 3
rank ( 2 I − A ) = 1 {\displaystyle \operatorname {rank} (2I-A)=1} と
rank ( 2 I − A ) 2 = 0 = n − μ {\displaystyle \operatorname {rank} (2I-A)^{2}=0=n-\mu } が分かる.したがって,ρ 2 = 1ρ 1 = 2A の標準基底は階数 2 の1つの線型独立な広義固有ベクトルと階数 1 の2つの線型独立な広義固有ベクトルを含むことが分かる,あるいは同じことだが,2つのベクトルの1つの鎖 {x 2 , x 1 } と1つのベクトルの1つの鎖 {y 1 } を含む.M = (y 1 x 1 x 2 )
M = [ 2 2 0 1 3 0 0 − 4 1 ] {\displaystyle M={\begin{bmatrix}2&2&0\\1&3&0\\0&-4&1\end{bmatrix}}} および
J = [ 2 0 0 0 2 1 0 0 2 ] , {\displaystyle J={\begin{bmatrix}2&0&0\\0&2&1\\0&0&2\end{bmatrix}},} ただし M は A の広義モード行列で,M の列は A の標準基底で,AM = MJ M と J の両方の列のいくつかは交換できるから,M と J はいずれも一意ではないことが従うことに注意.
例 6 例 4 において,行列 A に対する線型独立な広義固有ベクトルの標準基底を求めた.A の広義モード行列は
M = [ y 1 x 1 x 2 x 3 ] = [ − 14 2 − 2 0 4 0 2 0 − 3 0 0 1 1 0 0 0 ] {\displaystyle M={\begin{bmatrix}{\boldsymbol {y}}_{1}&{\boldsymbol {x}}_{1}&{\boldsymbol {x}}_{2}&{\boldsymbol {x}}_{3}\end{bmatrix}}={\begin{bmatrix}-14&2&-2&0\\4&0&2&0\\-3&0&0&1\\1&0&0&0\end{bmatrix}}} である.A に相似なジョルダン標準形の行列は
J = [ 4 0 0 0 0 5 1 0 0 0 5 1 0 0 0 5 ] {\displaystyle J={\begin{bmatrix}4&0&0&0\\0&5&1&0\\0&0&5&1\\0&0&0&5\end{bmatrix}}} であり,AM = MJ
応用 行列関数 詳細は「行列関数(英語版) 」を参照
正方行列 に実行できる最も基本的な演算の3つは,和とスカラー倍と積である.これらは n × n A の多項式 関数を定義するのにちょうど必要な演算である.多くの関数がマクローリン級数 として書けることを基本的な解析学 から思い出すと,行列のより一般の関数をきわめて容易に定義できる.A が対角化可能ならば,つまり
D = M − 1 A M {\displaystyle D=M^{-1}AM} で
D = [ λ 1 0 ⋯ 0 0 λ 2 ⋯ 0 ⋮ ⋮ ⋱ ⋮ 0 0 ⋯ λ n ] {\displaystyle D={\begin{bmatrix}\lambda _{1}&0&\cdots &0\\0&\lambda _{2}&\cdots &0\\\vdots &\vdots &\ddots &\vdots \\0&0&\cdots &\lambda _{n}\end{bmatrix}}} ならば,
D k = [ λ 1 k 0 ⋯ 0 0 λ 2 k ⋯ 0 ⋮ ⋮ ⋱ ⋮ 0 0 ⋯ λ n k ] {\displaystyle D^{k}={\begin{bmatrix}\lambda _{1}^{k}&0&\cdots &0\\0&\lambda _{2}^{k}&\cdots &0\\\vdots &\vdots &\ddots &\vdots \\0&0&\cdots &\lambda _{n}^{k}\end{bmatrix}}} であり,A の関数のマクローリン級数の計算は大きく単純化される.例えば,A の任意の冪 k を得るには,Dk を計算し,M を左から掛け,さらに M −1
広義固有ベクトルを用いて,A のジョルダン標準形を得ることができ,これらの結果は対角化可能でない行列の関数を計算する直截的手法に一般化できる.(行列関数#ジョルダン分解(英語版) を参照.)
微分方程式 次の線型常微分方程式系を解く問題を考える:
x ′ = A x , {\displaystyle {\boldsymbol {x}}'=A{\boldsymbol {x}},}
(5 )
ただし
x = [ x 1 ( t ) x 2 ( t ) ⋮ x n ( t ) ] , x ′ = [ x 1 ′ ( t ) x 2 ′ ( t ) ⋮ x n ′ ( t ) ] , {\displaystyle {\boldsymbol {x}}={\begin{bmatrix}x_{1}(t)\\x_{2}(t)\\\vdots \\x_{n}(t)\end{bmatrix}},\quad {\boldsymbol {x}}'={\begin{bmatrix}x_{1}'(t)\\x_{2}'(t)\\\vdots \\x_{n}'(t)\end{bmatrix}},} および A = ( a i j ) {\displaystyle A=(a_{ij})} 行列 A が対角行列で i ≠ j aij = 05 n 個の方程式の系に簡約される:
この場合,一般解は次で与えられる:
x 1 = k 1 e a 11 t {\displaystyle x_{1}=k_{1}e^{a_{11}t}} x 2 = k 2 e a 22 t {\displaystyle x_{2}=k_{2}e^{a_{22}t}} ⋮ {\displaystyle \vdots } x n = k n e a n n t {\displaystyle x_{n}=k_{n}e^{a_{nn}t}} 一般の場合には,A を対角化し系 (5 6 A が対角化可能ならば,M を A のモード行列として,D = M −1 AM A = MDM −1 5 M − 1 x ′ = D ( M − 1 x ) , {\displaystyle M^{-1}{\boldsymbol {x}}'=D(M^{-1}{\boldsymbol {x}}),}
y ′ = D y , {\displaystyle {\boldsymbol {y}}'=D{\boldsymbol {y}},}
(7 )
ただし
x = M y . {\displaystyle {\boldsymbol {x}}=M{\boldsymbol {y}}.}
(8 )
(7
y 1 = k 1 e λ 1 t {\displaystyle y_{1}=k_{1}e^{\lambda _{1}t}} y 2 = k 2 e λ 2 t {\displaystyle y_{2}=k_{2}e^{\lambda _{2}t}} ⋮ {\displaystyle \vdots } y n = k n e λ n t {\displaystyle y_{n}=k_{n}e^{\lambda _{n}t}} (5 x 8
一方,A が対角化可能でなければ,M を A の広義モード行列に選び,J = M −1 AM A のジョルダン標準形とする.系 y Jy
y 1 ′ = λ 1 y 1 + ϵ 1 y 2 ⋮ y n − 1 ′ = λ n − 1 y n − 1 + ϵ n − 1 y n y n ′ = λ n y n {\displaystyle {\begin{aligned}y_{1}'&=\lambda _{1}y_{1}+\epsilon _{1}y_{2}\\&\vdots \\y_{n-1}'&=\lambda _{n-1}y_{n-1}+\epsilon _{n-1}y_{n}\\y_{n}'&=\lambda _{n}y_{n}\end{aligned}}}
(9 )
ただし λi は J の主対角成分にある固有値であり,εi は J の優対角成分にある 1 と 0 である.系 (9 5 9 yn に対して解いて, y n = k n e λ n t {\displaystyle y_{n}=k_{n}e^{\lambda _{n}t}} yn のこの解を (9 y n − 19 y x 8
脚注 [脚注の使い方 ]
参考文献 Anton, Howard (1987), Elementary Linear Algebra (5th ed.), New York: Wiley , ISBN 0-471-84819-0 Axler, Sheldon (1997). Linear Algebra Done Right (2nd ed.). Springer. ISBN 978-0-387-98258-8 Beauregard, Raymond A.; Fraleigh, John B. (1973), A First Course In Linear Algebra: with Optional Introduction to Groups, Rings, and Fields , Boston: Houghton Mifflin Co., ISBN 0-395-14017-X Bronson, Richard (1970), Matrix Methods: An Introduction , New York: Academic Press, LCCN 70-97490 Burden, Richard L.; Faires, J. Douglas (1993), Numerical Analysis (5th ed.), Boston: Prindle, Weber and Schmidt, ISBN 0-534-93219-3 Cullen, Charles G. (1966), Matrices and Linear Transformations , Reading: Addison-Wesley, LCCN 66-21267 Franklin, Joel N. (1968), Matrix Theory , Englewood Cliffs: Prentice-Hall, LCCN 68-16345 Golub, Gene H.; Van Loan, Charles F. (1996), Matrix Computations (3rd ed.), Baltimore: Johns Hopkins University Press , ISBN 0-8018-5414-8 Harper, Charlie (1976), Introduction to Mathematical Physics , New Jersey: Prentice-Hall, ISBN 0-13-487538-9 Herstein, I. N. (1964), Topics In Algebra , Waltham: Blaisdell Publishing Company, ISBN 978-1114541016 Kreyszig, Erwin (1972), Advanced Engineering Mathematics (3rd ed.), New York: Wiley , ISBN 0-471-50728-8 Nering, Evar D. (1970), Linear Algebra and Matrix Theory (2nd ed.), New York: Wiley , LCCN 76-91646 外部リンク Stover, Christopher. "Generalized Eigenvector". mathworld.wolfram.com (英語). generalized eigenvector - PlanetMath .(英語)