r yarıçaplı bir küre üzerindeki herhangi bir P noktasının küresel koordinatlarla gösterimi
Küresel koordinat sistemi, üç boyutlu uzayda nokta belirtmenin bir yoludur.
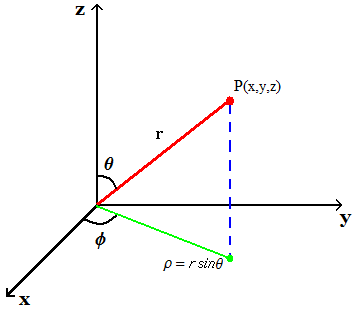
Küre üzerindeki bir nokta bu sistemde üç tane bileşenle ifade edilir, bunlar r, ve ' dir. Koordinatların tanımlı oldukları aralıklar ve tanımları şu şekilde verilir.
: Yarıçap P ve (0,0,0) noktası arasındaki uzaklıktır. Tanım aralığı olarak verilir.
: Enlem, z-ekseni ve çap arasındaki açıdır. aralığında tanımlıdır. Polar açı olarak da adlandırılır.
: Boylam, x-ekseni ile çapın xy-düzlemine izdüşümü () arasındaki açıdır. aralığında tanımlıdır. Diğer bir adı azimütal açıdır.
Bu sistem, dünya üzerinde coğrafi konum belirlerken kullanılan sistemdir. Dünya' nın yüzeyi üzerinde her noktada yarıçap aynı olduğundan, sadece enlem ve boylam ile bir yer belirlenebilir. Ayrıca fizikte küresel yapıya sahip sistemler, (dünya, güneş, yüklü bilye vs.) ele alınırken yine küresel koordinatlara geçiş yapılır. Küresel koordinatlarla Kartezyen koordinatlar arasındaki bağıntılar şu şekildedir.
Küresel koordinatlarda Laplasyen, diverjans ve gradyan Kartezyen koordinatlardakinden farklıdır. Jakobyen kullanılarak diferansiyel eleman hesaplanabileceği gibi şekilden de P noktası etrafında sonsuz küçük bir hacim elemanının büyüklüğü şu şekilde hesaplabilir.
Bu hacim elemanı bütün küre üzerinden integral alınarak R yarıçaplı kürenin hacmi bulunur.
Kalınlığı olmayan bir hacim elemanı,alan elemanı olacağından sonsuz küçük yüzey elemanı şu şekilde ele alınır.
Bu eleman bütün küre yüzeyi üzerinden integre edilirse R yarıçaplı kürenin alanı da bulunabilir.
Fizikte bu integraller herhangi bir yoğunluk fonksiyonuyla verilmiş elektrik ve yerçekimi alanındaki küreler için sıklıkla çözülür.
Küresel koordinatlarda integrasyon ve diferansiyasyon
Aşağıdaki denklemler varsayımı şu θ eğim z den (polar) axis (belirsiz x, y ve z ile karşılıklı olarak normaldir):
çizgisel öge için dan ya sonsuz yer değiştirmedir.
burada
yükselen yön içinde yerel ortogonal birim vektörlerdir, sırasıyla ve kartezyen uzay içinde birim vektörlerdir.
yüzey öge dan ya germe ve yarıçapta(sabit) bir küresel yüzey üzerinde ya dır
Böylece diferansiyel katı açı dir
Yüzey öge polar açının bir yüzeyi içinde sabit (başlangıç köşe ile bir koni) tir
güney açısının bir yüzey içinde yüzey ögesi sabit (bir dik yarı-düzlem) dir
Hacim ögesi dan ya geriliyor, ya ve ya is
Böylece, örnek için, bir fonksiyon üçkatlı integral ile R3 içinde her nokta üzerinde integrallenebilir
bu sistem içinde del işlemcisi tanımlı değildir ve böylece gradyan, diverjans ve curl açıkça tanımlanmış olmalıdır:
Kinematik
Bir noktanın küresel koordinatlar içinde konumu yazıldığında,
hız ise,
ve ivme,
Bir sabit φnın durumu içinde veya , bu kutupsal koordinatlar içinde vektör hesabına indirgenir.